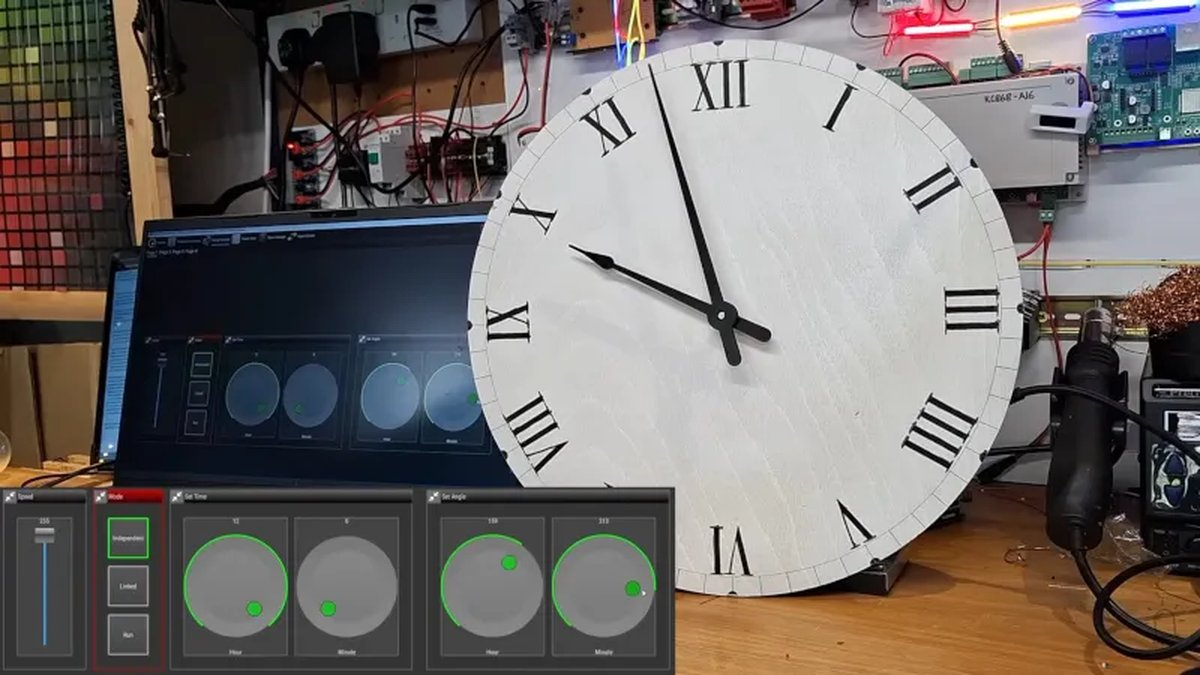
A clock is by its very nature a device for measuring time, and thus it moves forward at a constant rate. But how about in a theatrical setting, where time runs at the whim of the director? For the stage, a clock with more flexibility is required. To this endeavor [Playful Technology] has you covered, with a larger than life stage clock whose hands are independently controllable by DMX.
Behind the clock is a very unusual part, not the modified clock mechanism one might expect, but a dual stepper motor with a concentric shaft. This is driven by an Arduino with a stepper driver shield more familiar from the world of 3D printers, and an RS485 interface for DMX interfacing. The hands are built in OpenSCAD, and 3D printed to be an interference fit on the shafts. The DMX controller software has a handy rotating knob style interface, allowing easy hand manipulation.
You can see the results in the video below, complete with an exhaustive dissection of the Arduino code. Meanwhile DMX is itself a fascinating subject, and in the past we’ve taken a deep dive into RS485.
Some things are suitable for video. Some, things not so much.
For the love of all that is holy, a one-minute video and a git repo would be useful here. Or even just a dump of info in the video description. But nada.
Almost like they don’t want to transfer any useful information at all, just doin’ it for the clicks.
What is an ‘interference find’?
Argh! ‘interference fit’?
INterference fit: When the hole is a tad smaller than the shaft that goes into it. The easiest is a press fit, so that it can be forced in without too much trouble with a mechanical press, but locks in place without fasteners. A shrink fit requires heat and/or cooling to expand the outer part and/or contract the inner.
COntrast to sliding fit, where the part slides on freely, but has little play (one or two degrees of freedom typical, such as sliding and rotational), Loose, where the parts go together and may have more degrees of freedom (think a 12mm bolt in a 14mm hole), or transition, where the parts don’t require special help to go together, but when assembled tend to stay in place
THere are more precise definitions, and several subclasses along the way, but this is the gist.
Sentinel — Human
This analysis details a project combining physical technology (Arduino, 3D printing) with theatrical design, overlaid with a critical commentary on media presentation and data transfer efficiency.